Jasmine Liang

I am a research associate at University of Notre Dame AI and SciML, with a PhD in Computer Science and Biomechanics (the study of human motion) from Iowa State University. My research interests focus on machine learning applied to a variety of sequential data, e.g., time-series, spatiotemporal, NLP with applications spanning biomechanics, sensors, and engineering.
Known for contributions to 1. integrate AI and thermal distribution predition on transistor 2. deploy AI system on IMUs and MoCap to understand motion.
LinkedIn
Selected Projects Driving Real-World Impact
Pipeline for Text, Audio and Image, Multimodalities & Fine Tune LLM
Context-aware ChatPDF

Multimodal AI Applications with LangChain & OpenAI API
Anomaly Detection for Failing Servers On Networks
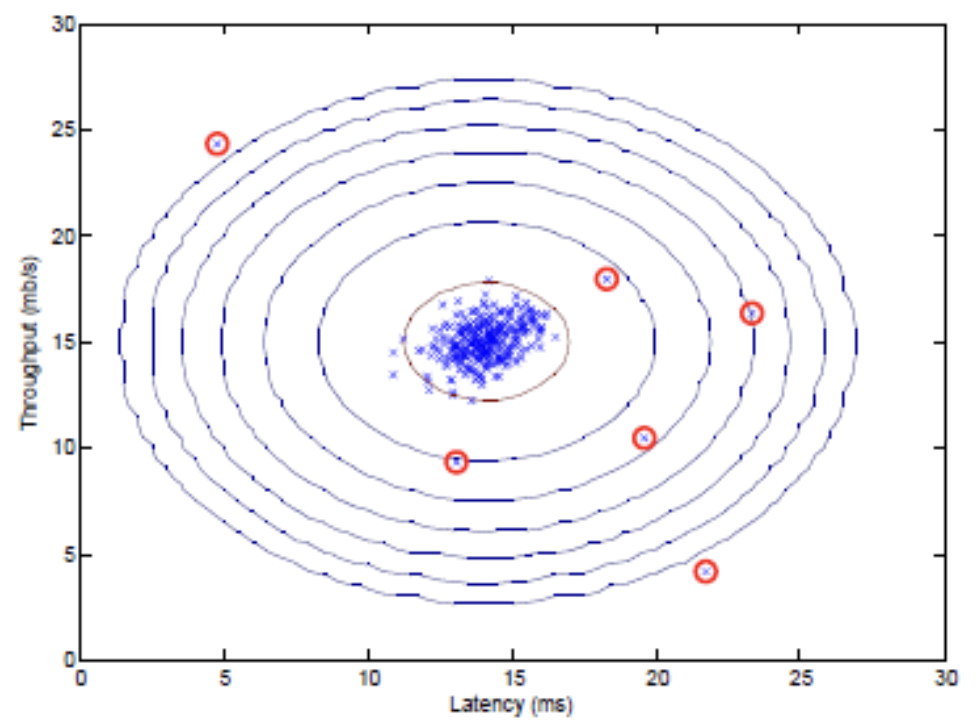 Developed anomaly detection algorithms to identify abnormal server behavior using throughput and latency metrics. Applied Gaussian models to visualize and detect anomalies in 2D datasets and extended the approach to high-dimensional data, achieving high detection accuracy through cross-validation. Optimized detection thresholds using precision-recall metrics, improving the accuracy of identifying true anomalies.
Developed anomaly detection algorithms to identify abnormal server behavior using throughput and latency metrics. Applied Gaussian models to visualize and detect anomalies in 2D datasets and extended the approach to high-dimensional data, achieving high detection accuracy through cross-validation. Optimized detection thresholds using precision-recall metrics, improving the accuracy of identifying true anomalies.
Recommendation Systems

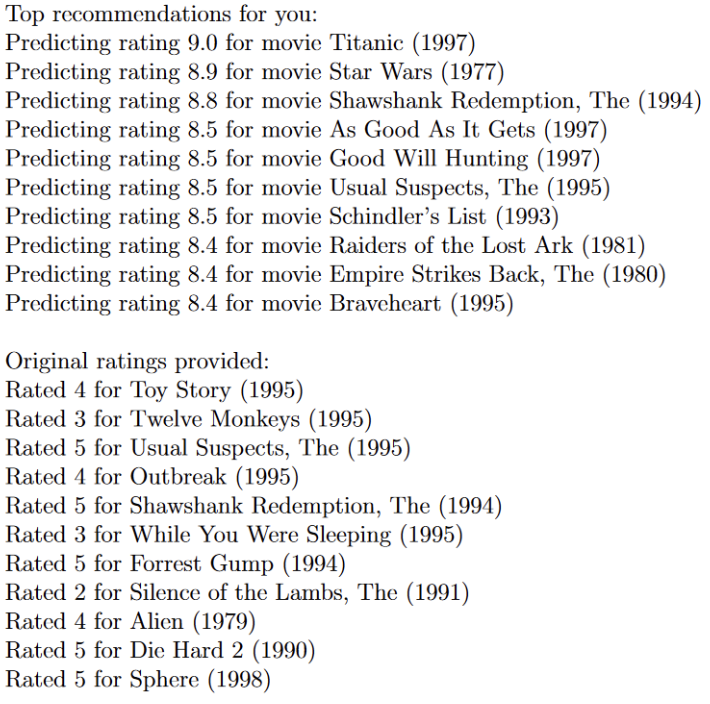 Developed and optimized collaborative filtering algorithms to predict movie ratings using a dataset of 1682 movies and 943 users. Implemented regularization techniques to improve model generalization and minimize overfitting. Enhanced user satisfaction by personalizing movie recommendations based on user preferences, improving engagement.
Developed and optimized collaborative filtering algorithms to predict movie ratings using a dataset of 1682 movies and 943 users. Implemented regularization techniques to improve model generalization and minimize overfitting. Enhanced user satisfaction by personalizing movie recommendations based on user preferences, improving engagement.
3D Orientation Estimation by AHRS and Advanced Kalmar Filter with IMUs
 A program that read IMU signal to estimate the real-time orientation and reconstruction of the object’s orientation back to 3D space.
A program that read IMU signal to estimate the real-time orientation and reconstruction of the object’s orientation back to 3D space.
AI Checker Game

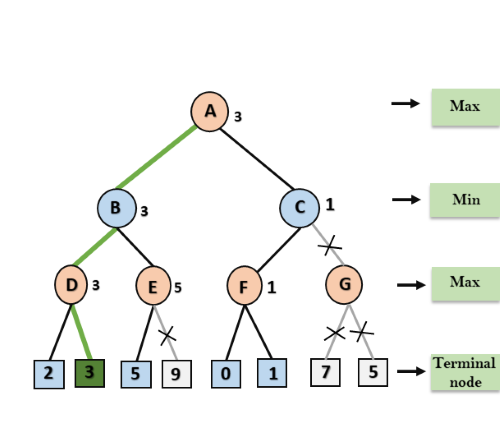 This project is an implementation of the classic Checker game with an AI opponent that utilizes the MinMax algorithm for decision making. The MinMax algorithm is a widely-used technique in game theory for determining the best move in a two-player, zero-sum game.
This project is an implementation of the classic Checker game with an AI opponent that utilizes the MinMax algorithm for decision making. The MinMax algorithm is a widely-used technique in game theory for determining the best move in a two-player, zero-sum game.
System for Enhancing Fair Judgement

 Developed real-time pose estimation algorithms using OpenPose to track dynamic gymnastics movements. Designed data structures for body points and trajectories with interactive visualization tools, ensuring accuracy and usability. Enhanced algorithms and user interface through testing and feedback from gymnasts and coaches
Developed real-time pose estimation algorithms using OpenPose to track dynamic gymnastics movements. Designed data structures for body points and trajectories with interactive visualization tools, ensuring accuracy and usability. Enhanced algorithms and user interface through testing and feedback from gymnasts and coaches
State Legislator Tweets Election Years

 Developed a Java application integrated with SQL to analyze state legislators’ tweets during an election year. Designed and executed SQL queries to extract insights from tweet content, trends, and sentiment. Provided data-driven visualizations to understand the political discourse and its evolution over time.
Developed a Java application integrated with SQL to analyze state legislators’ tweets during an election year. Designed and executed SQL queries to extract insights from tweet content, trends, and sentiment. Provided data-driven visualizations to understand the political discourse and its evolution over time.
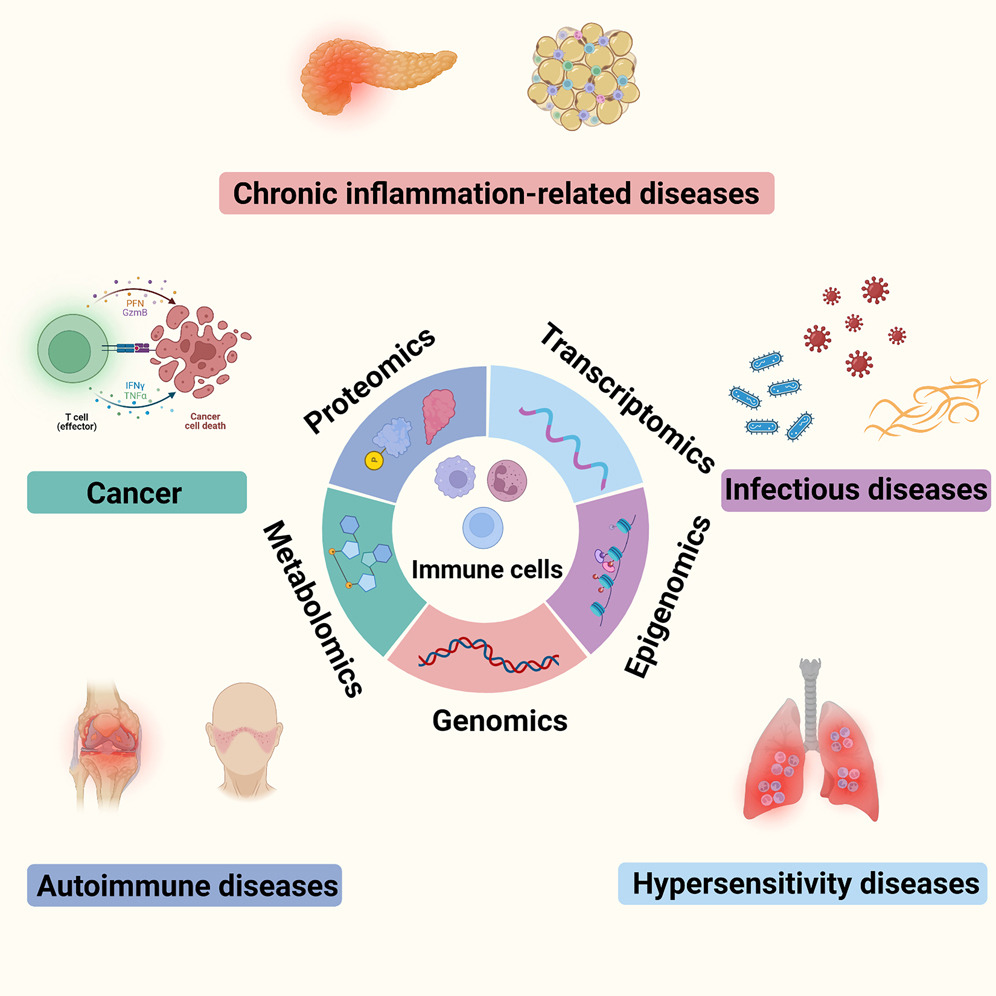
Multi Omics Analysis Of Metabolic Genes Perturbations In Saccharomyces Cerevisiae


Technical Mastery and Problem Solving
Machine Learning
- ML Architecture
- Neural Network
- Karush Kuhn Tucker Condition in SVM
- Fisher’s Linear Discriminant
- Learning Curve
- Decision Tree
- Unsupervised Learning - Clustering and Dimension Reduction
- Classifier
- SVM and Kernel
- Multilayer Perceptron
Data Science and Database Application
- Housing Price Prediction with Advanced Algorithm
- Fare and Demand
- Database Management Sysytem - Java Database Connectivity (JDBC)
- Database Management Sysytem - Java Server Pages (JSP)
- Database Management System Design
- Advanced Database Management System Research
AWS/Cloud/Security and Privacy
- Applying Cryptographic Primitives for Secure Communication
- AWS Services, EC2 instance, S3 Bucket
- AWS Virtual Isolation Mechanisms
- AWS Services, EC2 instance, S3 Bucket
Bioinformatics - Gene
- Graph and Network Analysis
- Data Visualization: t-SNE, Dimension Reduction
- Data Visualization: PCA, Dimension Reduction
- Network Inference Challenge, Area Under ROC curve (AUC), Bagging: Bootstrap, Data Processing Inequality
- Gene Ontology Experiment
- Whole Cell Model Construction
- DREAM Challenge, Precision and Recall (PR), Receiver Operating Characteristic (ROC), GENIES3, Boolean Network Model
Object-Oriented Programming (OOP)
Games
- Backpacker
- Cave Explorer
- Conway’s Game of Life
- Explosion Robot
Mini Projects
- Advanced Iteration Algorithm
- Advanced Strings Manipulation
Real-World Application
- Hello! World
- Atom & Basketball
- Rabbit Population Simulation
- Donut Shop
- Air Pumping
- The Runner
- Texas hold ‘em
- Grader
- Sorting
Innovative Research and Insights
AI and Adversarial Example
-
Machine Learning with Membership Privacy using Adversarial Regularization
-
Comprehensive Privacy Analysis of Deep Learning:Passive and Active White-box Inference Attacksagainst Centralized and Federated Learning
-
Adversarial Example in Biomech Research
AI and Healthcare
-
Cloud Computing in Healthcare and Privacy
-
Classify individual with Overweight by IMUs Signals
-
Situation Awareness in Falling Prediction and Prevention
-
AI Survey Over Applications of Patient with Stroke
Algorithm and Computational Theory
-
Advanced Algorithm
-
Theory of Computation
-
Advanced Computation (class content is not allowed to upload)
Turing Machine (TM) and Prove Computability, Decidability, Countability, Slice and Parameterized of Languages, Enumeration, Universal TM, Prefix TM, Classes and Subset, Quantum Computing
Honors and Awards
Achievements
-
University Research Excellent 2024
“The purpose of this award is to recognize the top 10% of graduate students for outstanding research accomplishments as documented in their theses and dissertations.”
- Aspiring Health Professionals Scholarship 2023
- Print & Grace Powers Hudson Scholarship 2023
- Student Travel Bursary at 9th World Congress of Biomechanics 2022
- Biomechanics Student Award at 9th World Congress of Biomechanics 2022
- Print & Grace Powers Hudson Scholarship 2022
- Charlotte and Stanley Herren Graduate Fellowship 2019
- Undergraduate Students Research Papers Published Awards 2019
- Awarded National Funding for Undergraduate Student Research 2015
- Undergraduate Research Project Presentation Award - Third Place 2015
Leadership and Services
- Reviewer for AAAI Symposium 2024
- Curriculum Developer for DH5160-Analytics AI Health Strategies
- Instructor of Biomechanics Class
Selective Papers
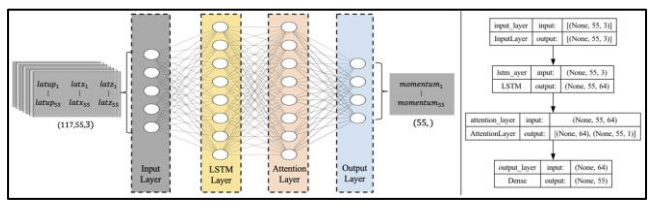
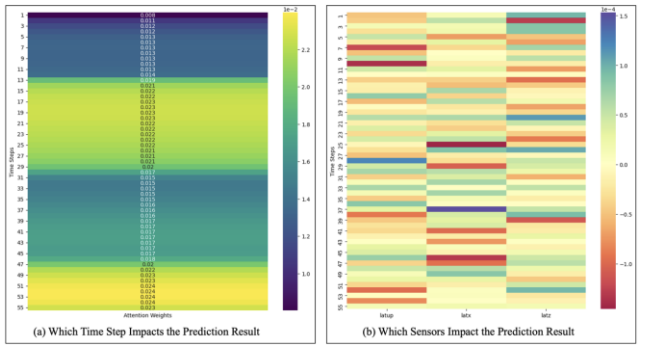
[1] JY Liang, H Bian, W Zhang, CK Chang, LS Chou. (2024) Striding into Clarity: Wearable Sensor-Driven Estimation of Knee Adduction Moment, Unveiling the Black Box with Sequence-Based Neural Networks and Explainable Artificial Intelligence. AAAI 2024 Spring Symposium on Clinical Foundation Models
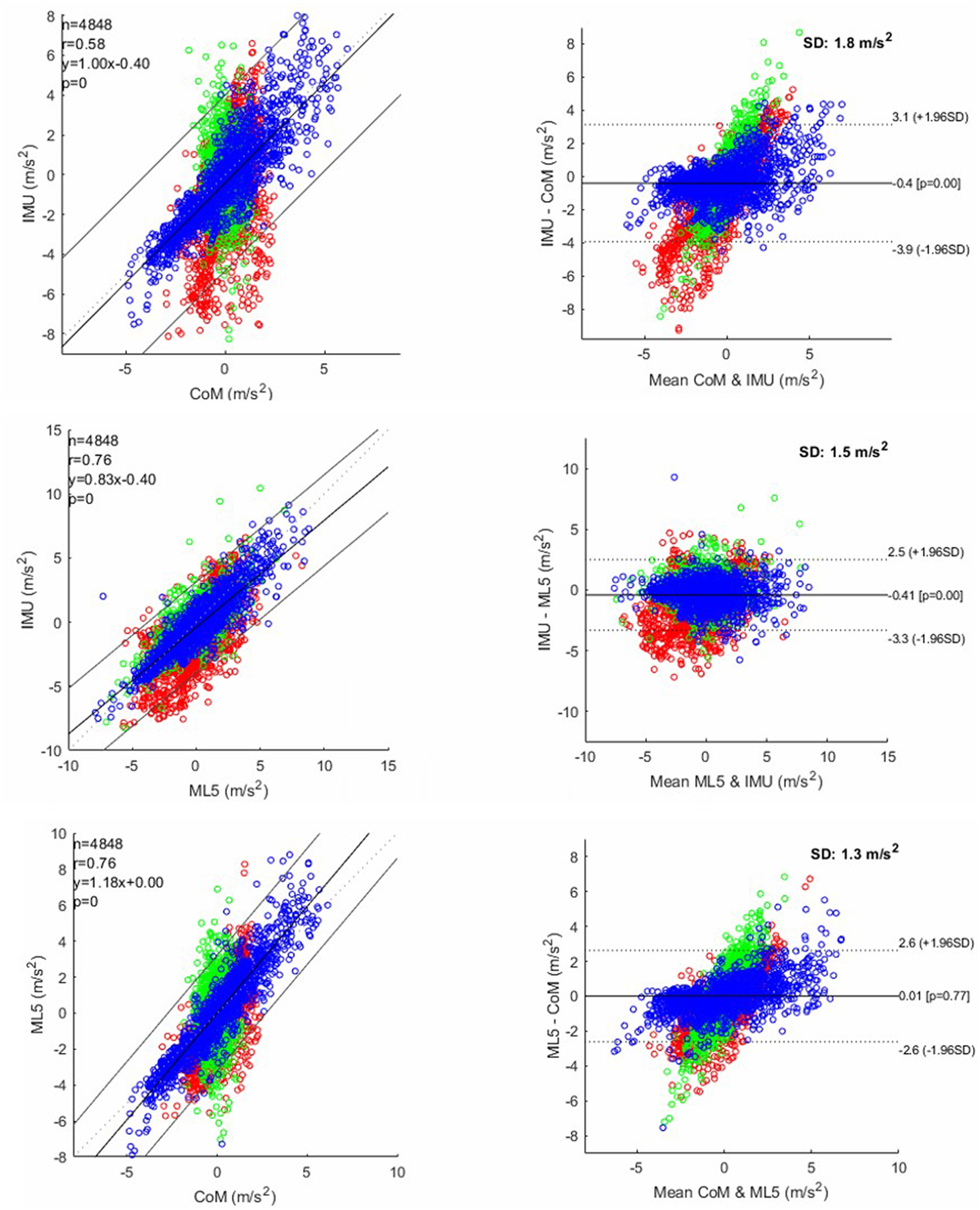
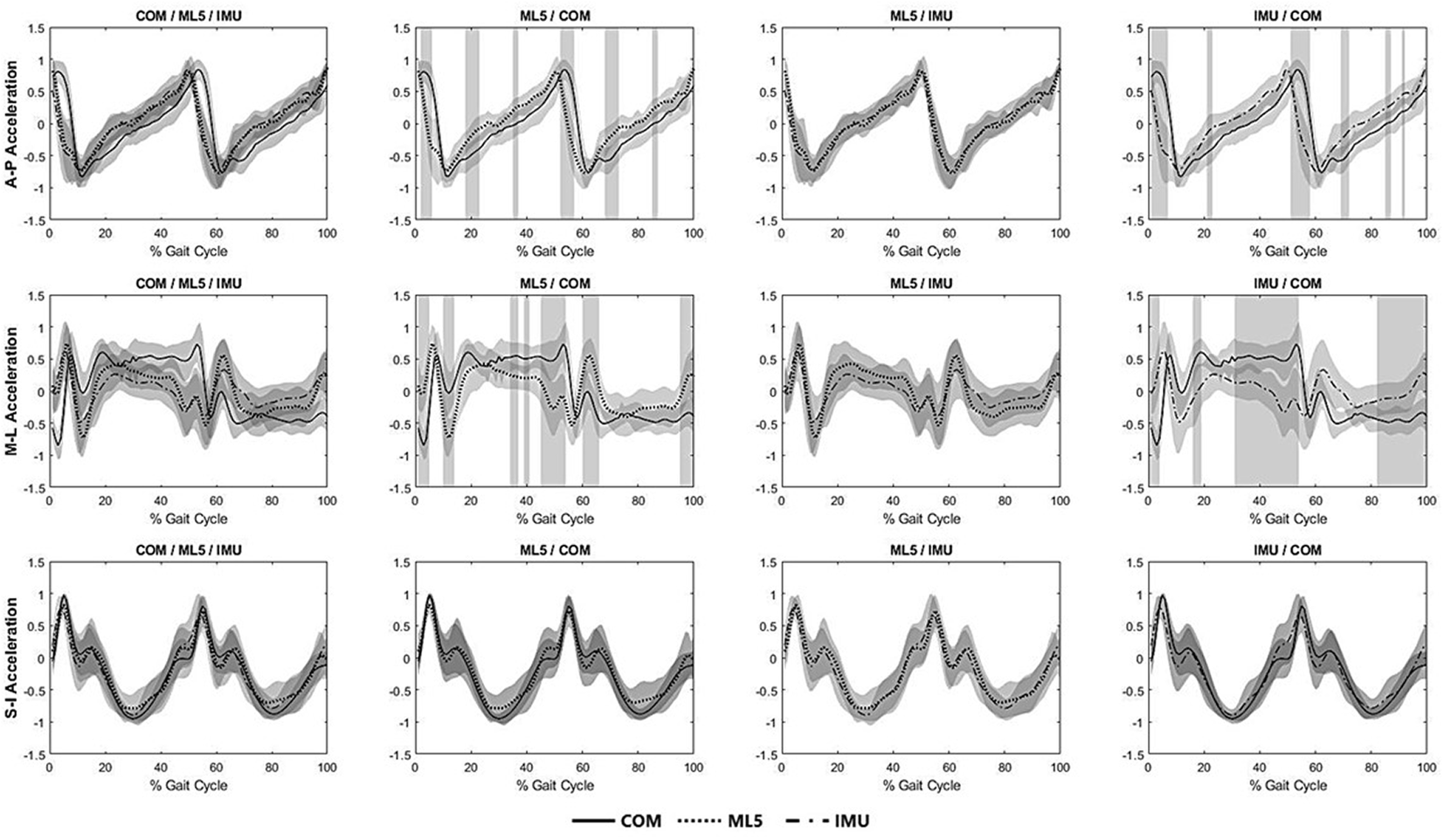
[2] JY Liang & LS Chou. (2024) Center of mass acceleration during walking: comparison between IMU and camera-based motion capture methodologies. Wearable Technologies
[3] JY Liang & LS Chou. Estimation of Knee Adduction Moment During Walking Using Wearable Sensor Data With the Application of Sequence-based Artificial Recurrent Neural Network. IX World Congress of Biomechanics 2022
[4] JY Liang & LS Chou. (2023) Assessment of Gait Balance Control Using Inertial Measurement Units — A Narrative Review. World Scientific Annual Review of Biomechanics, 2330006
[5] JY Liang , M Zhang, N Lamoureux, J Lansing, LS Chou, GJ Welk. (2023) Estimation of STEADI Performance Using Inertial Measurement Unit